ORC Reader for
Automotive Sensors
Integration and processing of real-time
sensory data to evaluate the accuracy of
object detection sensors
Industry:
Automotive OEM
Technologies:
C++, rapidJSON , CMake, RViz, ROS,
Apache ORC
Services:
Automotive Driving Assist Solutions Development Services

Problem
- The objective was to visualize real-time sensory data from a vehicle's bus system and evaluate the accuracy of its object detection sensors.
- The results were visualized using RViz and were implemented in the ROS (Robot Operating System) environment.
-
The data was processed using the rapid JSON library and written in C++, and built using C Make.
Challenge
- The challenge arose from the fact that the labelling data was stored as strings, while the vehicle bus data was represented in numerical form.
- The challenge was to compare the sensor's performance with the ground truth, which was established through the manual labelling process.
Solution
Overview
The team had to utilize their domain knowledge of automotive sensors and multiple-view geometry to overcome this challenge.
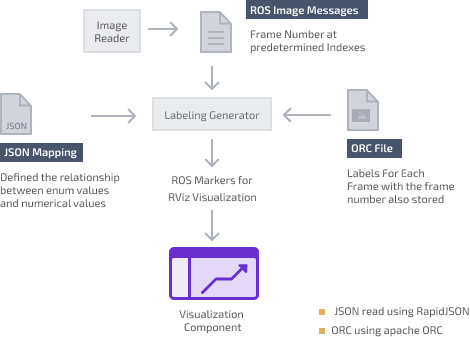
- Data Processing using rapidJSON library - The manual labeling data and the vehicle bus data were processed using the rapidJSON library, which is a high-performance JSON library written in C++. The library was used to parse the data stored as strings into a readable format.
- Use of Apache ORC - The Apache ORC (Optimized Row Columnar) format was used to store and process the data efficiently. The ORC reader allowed for the fast and efficient reading of data stored in the ORC format, which was essential for visualizing the real-time sensory data.
- Visualization using RViz in the ROS environment - The results of the data processing were visualized using RViz, a 3D visualization tool for robots, in the ROS (Robot Operating System) environment. The visualization allowed for a clear and interactive representation of the data, enabling the team to easily evaluate the accuracy of the object detection sensors.
- Comparison with Ground Truth - The ground truth was established through the manual labeling process, and the results of the object detection sensors were compared with it.